
Corrugated Robot






Working:
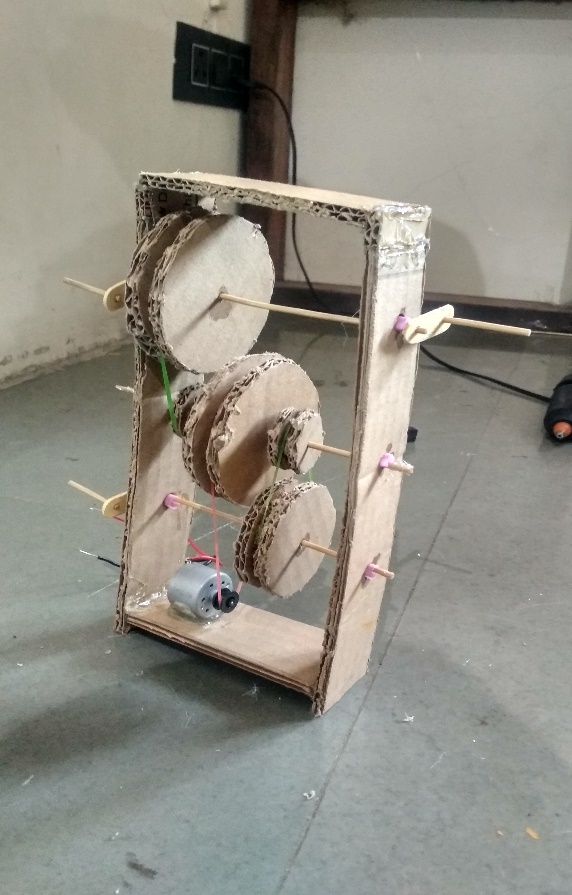
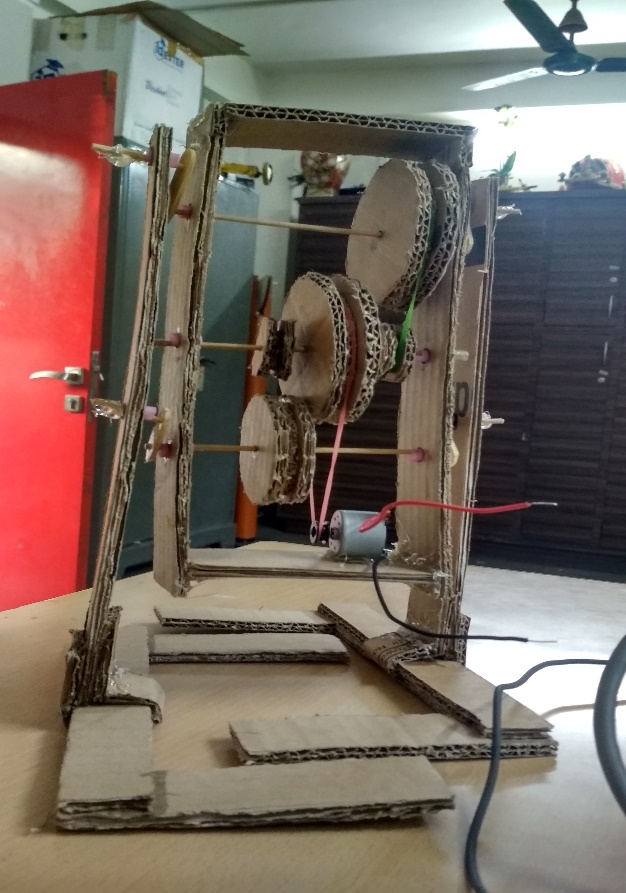
There will be no microcontroller here so no coding involved! Attach wires to the dc motor using soldering iron. Creation of effective locomotion for legged robots is a difficult task. Providing sufficient locomotion ability to robots is a key element for its designing process. When switch on the power from battery motor shaft will be rotating with 300RPM.Gears are connect with the other gears through a Rubber Belt So, the robot foot will be locomotion with left or right.
Smt S.H Gajera Vidyabhavan - Katargam
Making:
- Step 1 – Cut 2pieces of 22cm*6cm of cardboard.
- Step 2 – Cut 2 pieces of 6cm*10cm of cardboard.
- Step 3 – Stick the 2.5cm Barring connected with 1cm small Barring.
- Step 4 – Second small piece on that big Barring in second corner.
- Step 5 – Stick the big barring on them.
- Step 6 – Cut a 3cm Radius barring using Corrugated Sheet, It’s Connected with Motor Shaft with rubber belt.
- Step 7 – Stick them together, using glue gun and Fevikwick.
- Step 8 – Attach the geared DC motor to the 9V battery "foot".
Components:
- THICK CARDBORD SHEET,9V BATTERY,9V DC MOTOR,3 RUBBER RING
- LONG THOOTHPIN,CANDY STICK,WIRES AND GLUE GUN
- 2 LED LIGHT,WOOD SHEET,BATTERY CAP,SWITCH,BLACK WIRE TAPE
Learning Outcome:
Students will get knowledge about how the COROCATED ROBOT is functioning and they know about how to Make a Corrugated Gears.Using this Corrugated Gears how to set a mechanism for a motion. Also get knowledge about what is motors and its Torque or RPM. Students has learn how to solve the daily life problems and create some new idea with practical work.
Team
- Utsav Savani - Grade 8
- Aryan Soni - Grade 8
- Smit Salodiya - Grade 8
- Shreyash Bodar - Grade 8
- Chodivala Manav - Grade 8